Å starte med robotikk for nybegynnere er enklest når du bygger en enkel robot med hjul ved hjelp av et Arduino-klassebrett, en motordriver og én avstandssensor. Dette praktiske prosjektet passer også til robotprogrammering for nybegynnere med en kort, lesbar skisse.
Hva du skal bygge
En tohjuls differensialdrevet robot som ruller fremover og snur når den oppdager en hindring. Den bruker vanlige deler tilgjengelig i alle robotikksett.
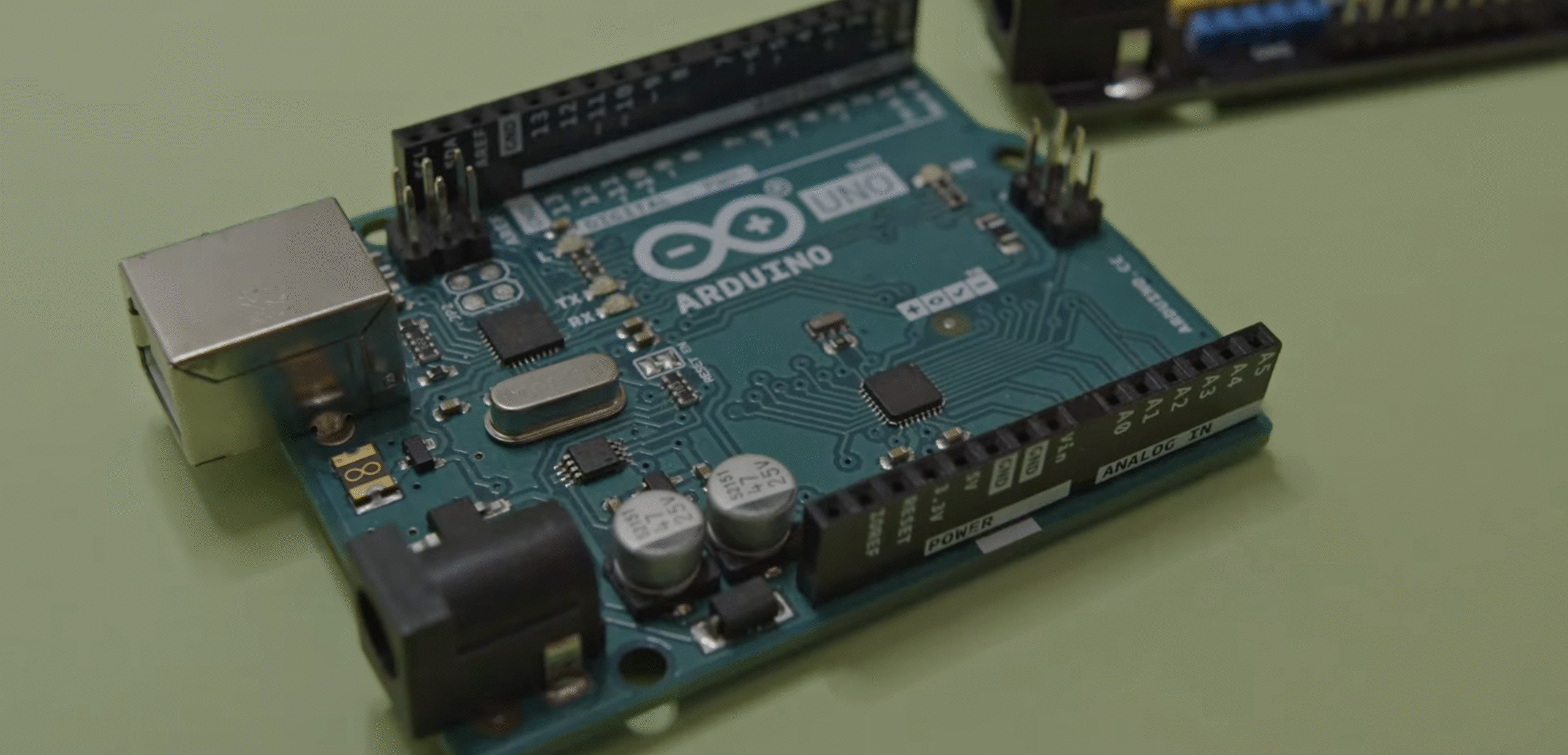
Kontroller: Arduino UNO (eller Elegoo UNO R3), eller Seeed Romeo BLE hvis du foretrekker innebygde motorhoder. Motordriver: L298N eller TB6612FNG dobbel DC-driver. Driv: 2 girede DC-motorer med hjul, pluss et bakhjul. Sensor: HC-SR04 ultralyd (eller IR-avstandsmodul). Strøm: 4–6x AA-holder eller 2S Li-ion med bryter og 1–2 A sikring. Chassis: Akryl/aluminiumsplate med avstander (Elegoo Smart Robot Kit-chassis fungerer bra). Kabling: Diverse hann-kvinnelige jumpere, anstendige batteriledninger. Verktøy: Små skrutrekkere, wirestriper, sidekuttere, valgfri loddebolt. 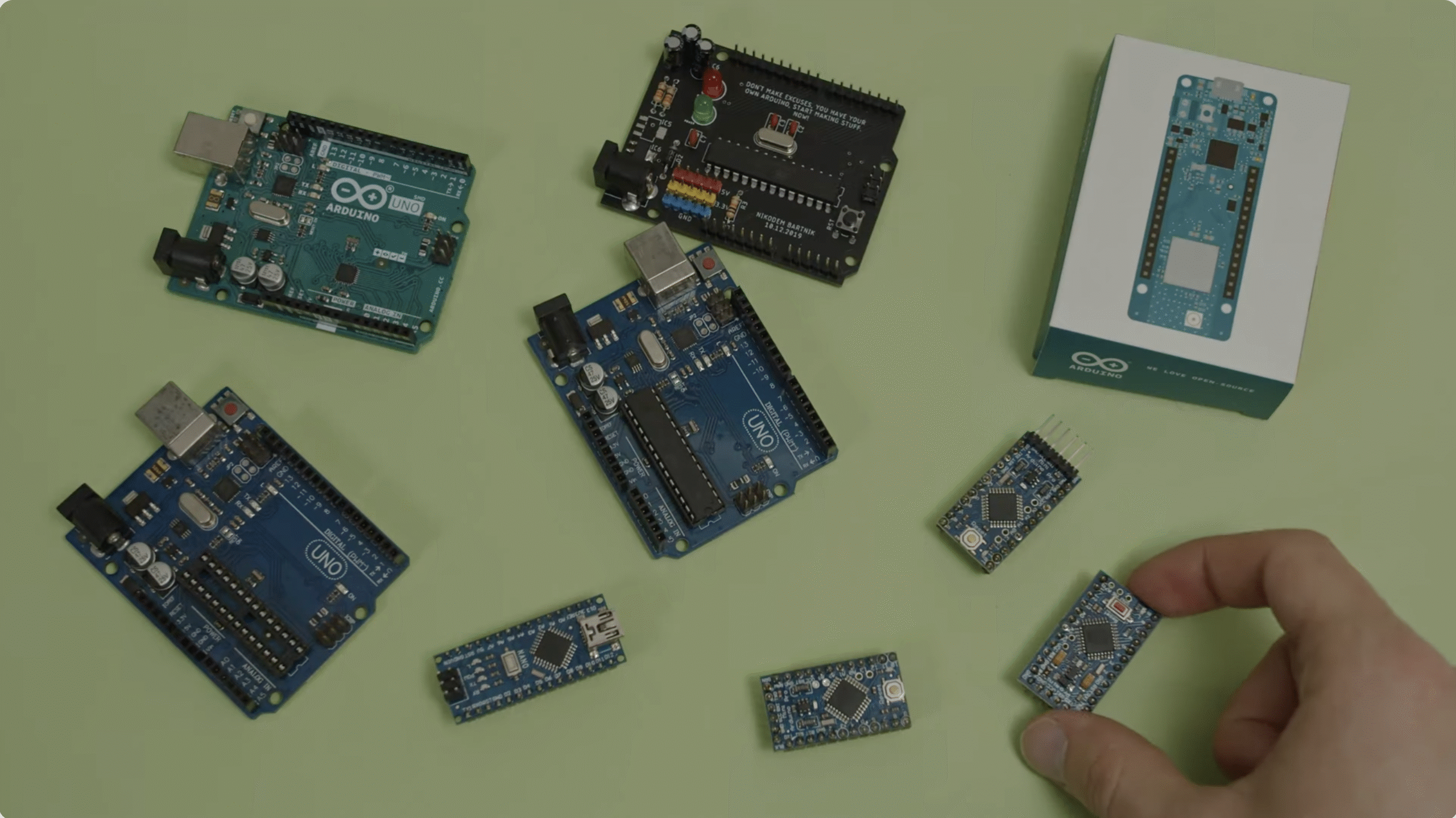
Før du setter i gang
; verifiser polariteten med et multimeter. Hold kontrolleren på et separat avstandslag for å unngå shorts. Skriv ut en én-sides robotikk for nybegynnere PDF-sjekkliste slik at du kan merke hvert trinn som ferdig.
Byggetrinn (nummerert)
Monter motorer og hjul: Fest begge likestrømsmotorene til chassiset. Press-pass hjul og legg til det bakre hjulet slik at boten sitter i vater. 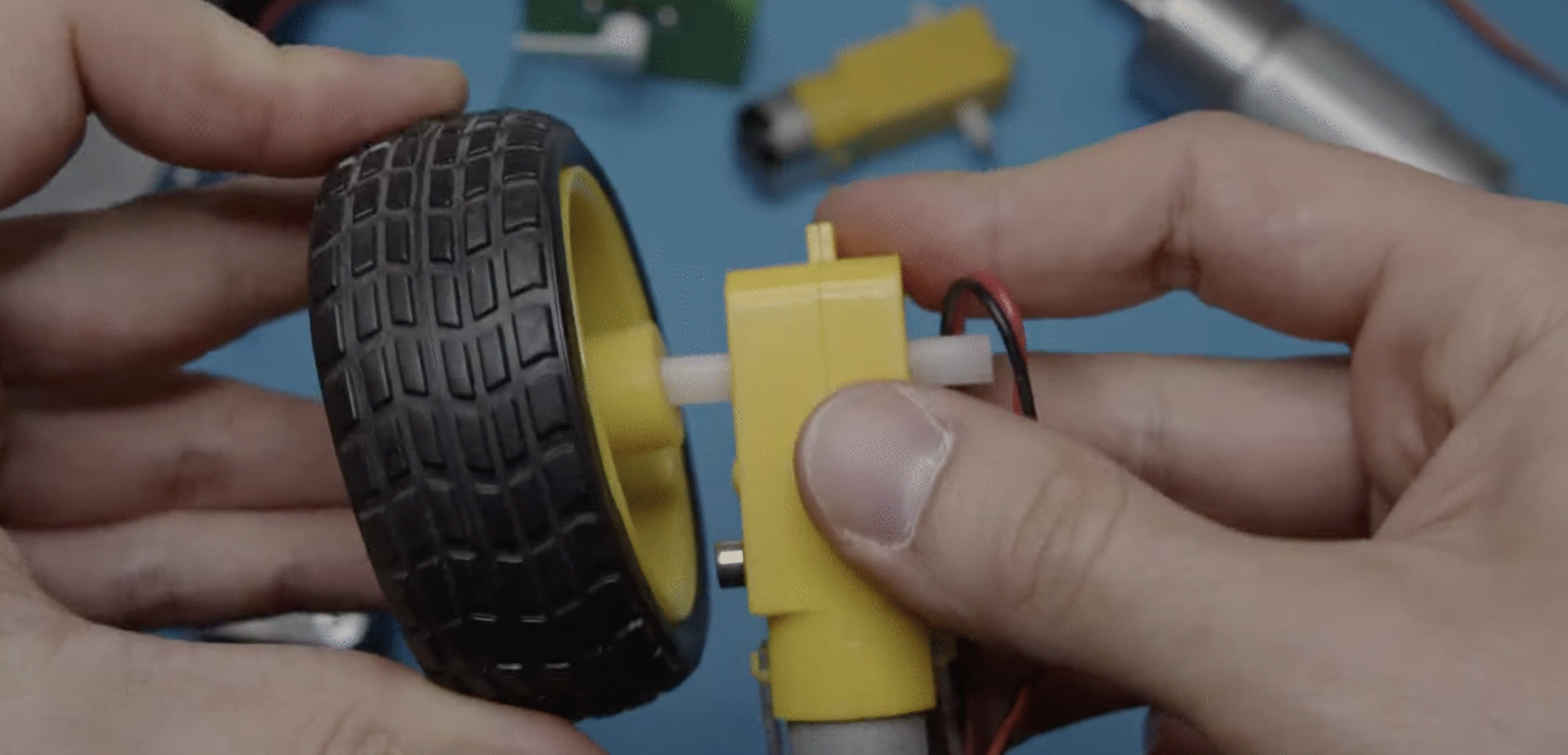
 Legg til sensoren: Monter HC-SR04 foran. Koble VCC, GND, TRIG og ECHO til merkede Arduino-pinner. Bakkesjekk: Sørg for at alle moduler deler GND. Dra lett i hver genser for å bekrefte en solid forbindelse. Krafttest: Vri bryteren med hjulene fra bordet. Ingen røyk, ingen varme, lysdioder normalt.
Legg til sensoren: Monter HC-SR04 foran. Koble VCC, GND, TRIG og ECHO til merkede Arduino-pinner. Bakkesjekk: Sørg for at alle moduler deler GND. Dra lett i hver genser for å bekrefte en solid forbindelse. Krafttest: Vri bryteren med hjulene fra bordet. Ingen røyk, ingen varme, lysdioder normalt.
Programmer roboten
Åpne IDE-en din og lim inn denne minimale skissen. Den kjører fremover til en hindring er nær, så svinger den. Dette passer til robotprogrammering for nybegynnere.
d-25.01. obstacle-avoid bot (Arduino-stil) const int in1=5, in2=6, in3=9, in4=10; //motorpinner (PWM-kompatible) const int trig=2, echo=3; //ultralyd lang distCM(){ digitalWrite(trig,LOW); delayMicroseconds(2); digitalWrite(trig,HIGH); delayMicroseconds(10); digitalWrite(trig,LOW); lang d=pulsIn(ekko,HØY,25000); //timeout ~25 ms retur d*0,034/2; } void motor(int L,int R){//-255..255 analogWrite(in1, L>0?L:0); analogWrite(in2, L<0?-L:0); analogWrite(in3, R>0?R:0); analogWrite(in4, R<0a-R:0); } void setup(){ pinMode(trig,OUTPUT); pinMode(ekko,INPUT); } void loop(){ if(distCM()>25) motor(140,140); else { motor(150,-150); forsinkelse(350); } }
Last opp, plasser roboten på gulvet og test i et åpent område. Hold en hånd nær bryteren.
Tune og forleng
Trim rettlinjet bevegelse ved å redusere PWM litt på det raskere hjulet. Bytt til en linjesensor og skriv en enkel P-kontroller for sporing. Legg til Bluetooth-kontroll fra telefonen ved hjelp av en HC-05 og en seriell app.
Feilsøking
Motorer snurrer ikke
Batteriet synker under belastning. Prøv ferske celler eller en høyere strømpakke. Pins samsvarer ikke. Bekreft at kodepinnene samsvarer med driverinndata. Ingen felles grunn. Knyt Arduino GND til sjåføren GND.
Robot svinger til venstre/høyre
Hjul eller girkasser er forskjellige. Balanse med små PWM-endringer per side. Chassis flex. Sett avstandene på nytt slik at akslene er parallelle.
Sensoren leser null eller maks.
Feilkoblet TRIG/EKKO. Bytt om nødvendig. Ekko-timeout for lang; redusere pulseIn timeout for stabilitet. Monter sensoren vekk fra hjulene for å redusere vibrasjoner.
Finn ut mer (raske veier)
Skriv ut en sjekkliste på én side som en robotikk for nybegynnere PDF. Skum en godt vurdert robotikkbok for konsepter du vil gjenbruke. Prøv gratis robotikkkurs for nybegynnere for å øve på kodestruktur.
Sammendrag
Samle deler fra et pålitelig robotikksett. Sett sammen chassis, driver, strøm og sensor med delt jord. Last opp skissen for minimal unngåelse og test. Still inn PWM, legg til funksjoner og gjenta med små endringer. Fortsett å lære med kurs, en rask PDF og en solid nybegynnerbok.