Beginnen met robotica voor beginners is het gemakkelijkst als je een eenvoudige robot op wielen bouwt met behulp van een bord van Arduino-klasse, een motordriver en één afstandssensor. Dit praktijkgerichte project past ook bij roboticaprogrammeren voor beginners met een korte, leesbare schets.
Wat je gaat bouwen
Een tweewielige robot met differentiële aandrijving die naar voren rolt en draait wanneer hij een obstakel detecteert. Het maakt gebruik van gemeenschappelijke onderdelen die beschikbaar zijn in elke robotkit.
Controller: Arduino UNO (of Elegoo UNO R3), of Seeed Romeo BLE als je de voorkeur geeft aan ingebouwde motorheaders. Motordriver: L298N of TB6612FNG dubbele DC-driver. Aandrijving: 2 gelijkstroommotoren met wielen, plus een zwenkwiel aan de achterkant. Sensor: HC-SR04 ultrasoon (of IR-afstandsmodule). Voeding: 4–6x AA-houder of 2S Li-ion met schakelaar en 1–2 A-zekering. Chassis: plaat van acryl/aluminium met afstandhouders (chassis van de Elegoo Smart Robot Kit werkt goed). Bekabeling: diverse mannelijke en vrouwelijke jumpers, accukabels van behoorlijke maat. Gereedschap: Kleine schroevendraaiers, draadstripper, zijsnijder, optionele soldeerbout. 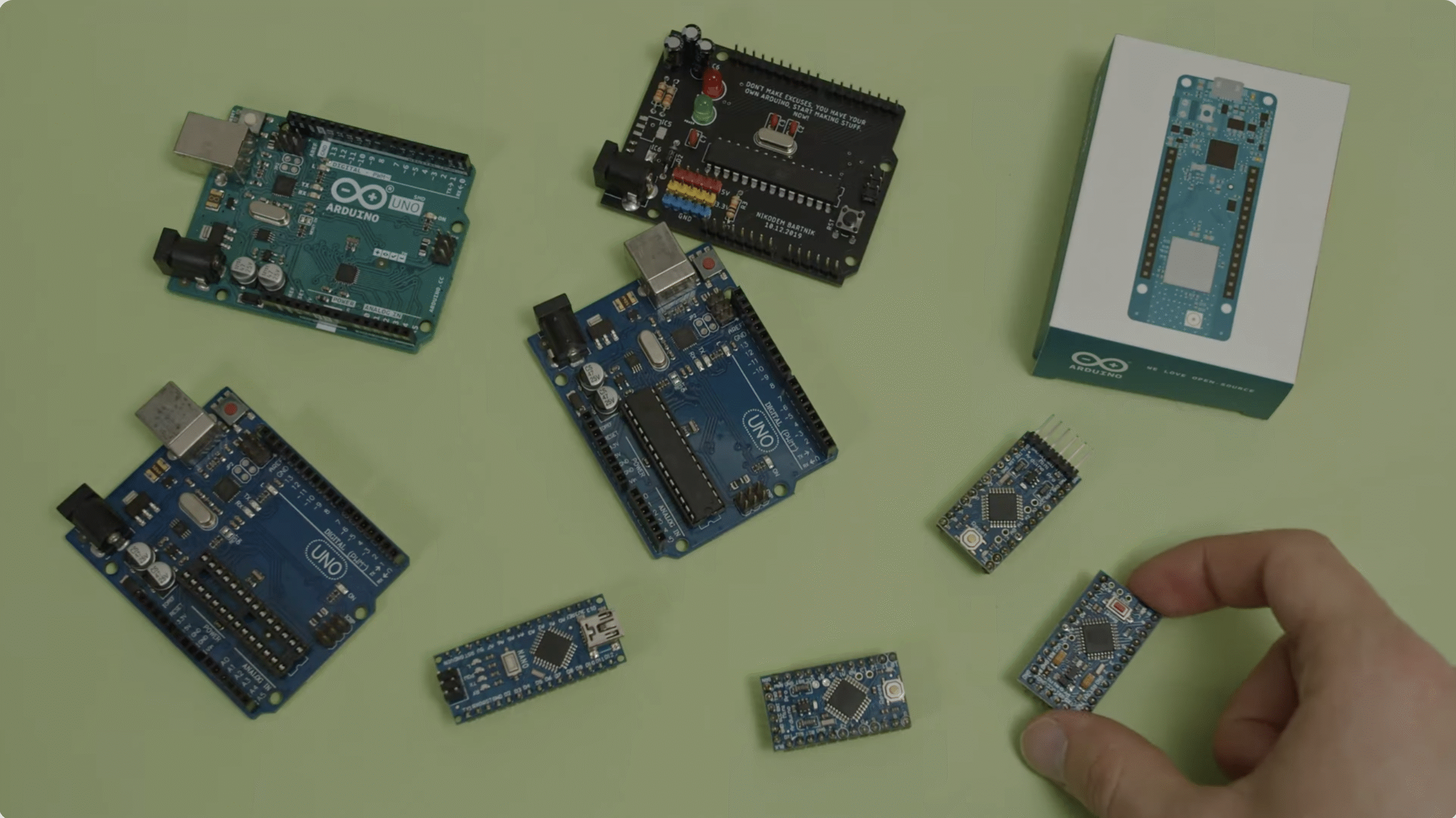
Voordat u begint
Laad of installeer nieuwe batterijen; controleer de polariteit met een multimeter. Plaats de controller op een afzonderlijke afstandslaag om kortsluiting te voorkomen. Druk een robotica voor beginners pdf-checklist van één pagina af, zodat u elke stap als voltooid kunt markeren.
Bouwstappen (genummerd)
Motoren en wielen monteren: Bevestig beide gelijkstroommotoren aan het chassis. Druk de wielen op elkaar en voeg het achterste zwenkwiel toe zodat de bot waterpas staat. 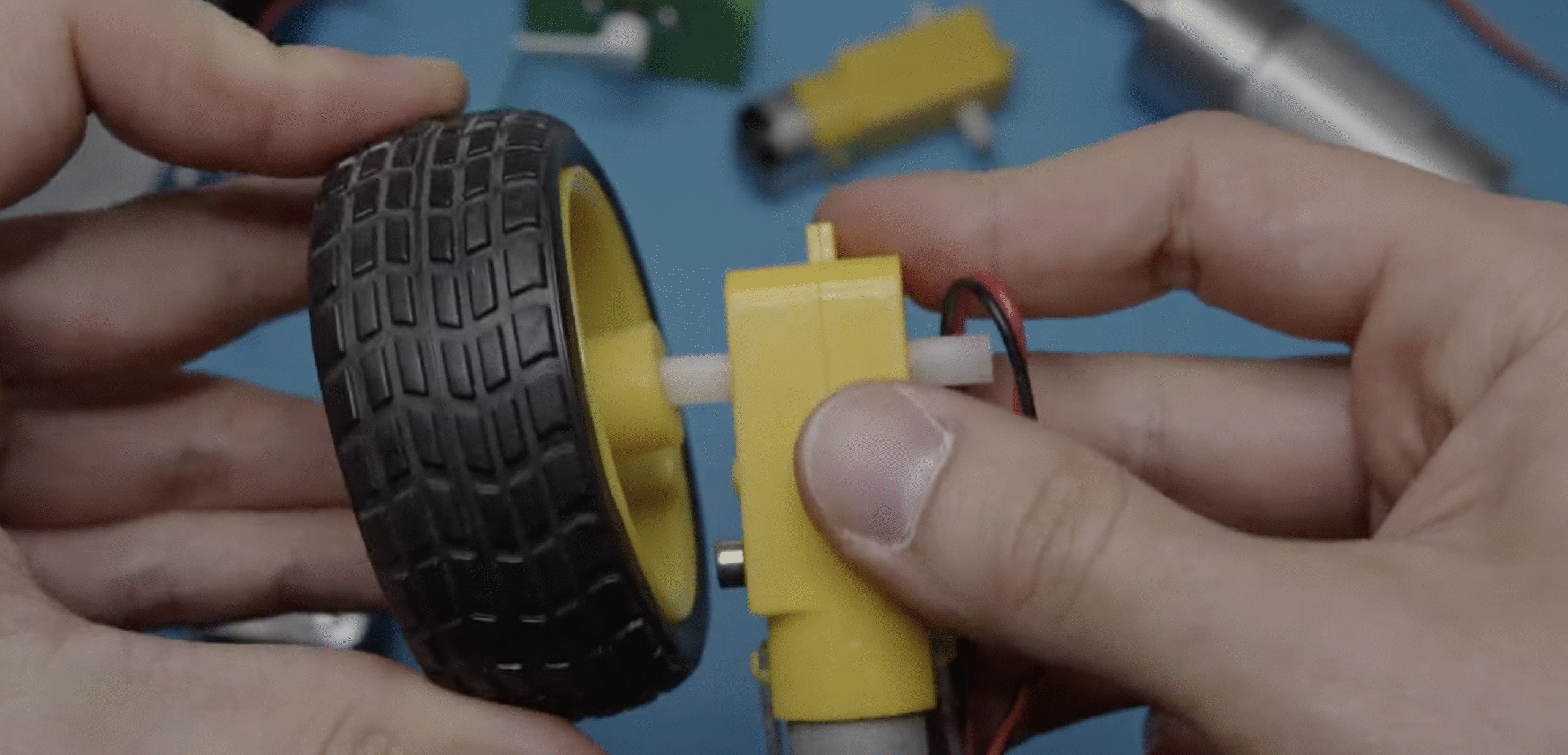 Installeer de motordriver: Zet de L298N/TB6612FNG vast op afstanden. Let op de ingangen (IN1–IN4) en uitgangen (MA/MB). Bekabeling en schakelaar: Leid de batterij + door de tuimelschakelaar en zekering naar het VIN van de bestuurder; route batterij – naar bestuurder GND. Plaats de Arduino: Plaats de UNO of Romeo. Sluit driveringangen aan op PWM-compatibele pinnen (voor UNO, bijvoorbeeld D5, D6, D9, D10).
Installeer de motordriver: Zet de L298N/TB6612FNG vast op afstanden. Let op de ingangen (IN1–IN4) en uitgangen (MA/MB). Bekabeling en schakelaar: Leid de batterij + door de tuimelschakelaar en zekering naar het VIN van de bestuurder; route batterij – naar bestuurder GND. Plaats de Arduino: Plaats de UNO of Romeo. Sluit driveringangen aan op PWM-compatibele pinnen (voor UNO, bijvoorbeeld D5, D6, D9, D10).  Voeg de sensor toe: Monteer de HC-SR04 aan de voorkant. Sluit VCC, GND, TRIG en ECHO aan op gelabelde Arduino-pinnen. Grondcontrole: Zorg ervoor dat alle modules GND delen. Trek lichtjes aan elke jumper om een stevige verbinding te bevestigen. Vermogenstest: zet de schakelaar om terwijl de wielen van de tafel zijn. Geen rook, geen hitte, LED’s normaal.
Voeg de sensor toe: Monteer de HC-SR04 aan de voorkant. Sluit VCC, GND, TRIG en ECHO aan op gelabelde Arduino-pinnen. Grondcontrole: Zorg ervoor dat alle modules GND delen. Trek lichtjes aan elke jumper om een stevige verbinding te bevestigen. Vermogenstest: zet de schakelaar om terwijl de wielen van de tafel zijn. Geen rook, geen hitte, LED’s normaal.
Programmeer de robot
Open uw IDE en plak deze minimale schets. Hij rijdt vooruit totdat er een obstakel dichtbij is en draait dan. Dit is geschikt voor roboticaprogrammering voor beginners.
//Minimale obstakelvermijdende bot (Arduino-stijl) const int in1=5, in2=6, in3=9, in4=10; //motorpinnen (geschikt voor PWM) const int trig=2, echo=3; //ultrasone lange distCM(){digitalWrite(trig,LOW); vertragingMicroseconden(2); digitalWrite(trig,HOOG); vertragingMicroseconden(10); digitalWrite(trig,LAAG); lang d=pulseIn(echo,HOOG,25000); //time-out ~25 ms return d*0.034/2; } void motor(int L,int R){//-255..255 analogWrite(in1, L>0?L:0); analoogSchrijven(in2, L<0?-L:0); analogWrite(in3, R>0?R:0); analoogSchrijven(in4, R<0?-R:0); } void setup(){pinMode(trig,OUTPUT); pinModus(echo,INVOER); } void loop(){ if(distCM()>25) motor(140,140); anders { motor(150,-150); vertraging(350); } }
Upload, plaats de robot op de vloer en test in een open ruimte. Houd uw hand in de buurt van de schakelaar.
Afstemmen en verlengen
Trim de beweging in een rechte lijn door de PWM op het snellere wiel iets te verlagen. Schakel over naar een lijnsensor en schrijf een eenvoudige P-controller voor tracking. Voeg Bluetooth-bediening toe vanaf uw telefoon met behulp van een HC-05 en een seriële app.
Problemen oplossen
Motoren draaien niet
Batterij zakt door onder belasting. Probeer nieuwe cellen of een pakket met een hogere stroomsterkte. Pinnen komen niet overeen. Controleer of de codepinnen overeenkomen met de invoer van de bestuurder. Geen gemeenschappelijke basis. Verbind Arduino GND met driver GND.
Robot buigt naar links/rechts
Wielen of versnellingsbakken verschillen. Balans met kleine PWM-veranderingen per kant. Flexibel chassis. Plaats de afstandhouders opnieuw zodat de assen evenwijdig zijn.
Sensor geeft nul of max aan
Verkeerde bedrading TRIG/ECHO. Wissel indien nodig. Echo-time-out te lang; verminder pulseIn time-out voor stabiliteit. Monteer de sensor weg van de wielen om trillingen te verminderen.
Meer informatie (snelle paden)
Druk een checklist van één pagina af als een robotica voor beginners-pdf. Blader een goed beoordeeld roboticaboek door voor concepten die u opnieuw kunt gebruiken. Probeer gratis roboticacursussen voor beginners om de codestructuur te oefenen.
Samenvatting
Verzamel onderdelen uit een betrouwbare roboticakit. Monteer chassis, driver, voeding en sensor met gedeelde grond. Upload de minimale vermijdingsschets en test. Stem PWM af, voeg functies toe en herhaal met kleine wijzigingen. Blijf leren met cursussen, een snelle pdf en een solide beginnersboek.