Stel je voor dat een robot complexe taken leert, zoals het samenstellen van ingewikkelde componenten of het navigeren door uitdagend terrein, niet over maanden of jaren, maar in een tijdsbestek van één dag.
Dit is het transformerende potentieel van Genesis, een open-source natuurkundesimulatieplatform ontwikkeld door Carnegie Mellon University en onderzoekers uit de particuliere sector.
Genesis stelt robots in staat virtuele training te ondergaan met snelheden tot 81 keer sneller dan training in de echte wereld , waardoor tientallen jaren van leren effectief worden samengevat in slechts enkele uren. De baanbrekende nieuwe technologie opent deuren naar een toekomst waarin robots naadloos in ons leven kunnen worden geïntegreerd en kunnen helpen bij alles, van productie en gezondheidszorg tot verkenning en rampenbestrijding.
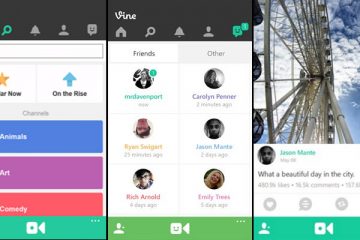
 Snelheidsvergelijking met populaire CPU en GPU-gebaseerde robotica-simulators. (Bron: Genesis GitHub-pagina)
Snelheidsvergelijking met populaire CPU en GPU-gebaseerde robotica-simulators. (Bron: Genesis GitHub-pagina)
Maar Genesis is meer dan alleen een snelheidsduivel; het is een verfijnde symfonie van natuurkunde en kunstmatige intelligentie, die de ingewikkelde dans van natuurwetten harmoniseert met de creatieve kracht van AI. Deze symfonie wordt uitgevoerd door een krachtige fysica-engine die in staat is het samenspel van krachten, bewegingen en interacties te simuleren die de fysieke wereld beheersen.
Het genereren van werelden voor robotica en AI-training
Beschreven als de “snelste fysica-engine ter wereld”, biedt Genesis ongekende simulatiesnelheden tot 81 keer sneller dan de bestaande GPU-versnelde robotsimulators, zoals Nvidia’s Isaac Gym en Mujoco MJX, zonder enig compromis op het gebied van simulatienauwkeurigheid en betrouwbaarheid. Ontworpen voor robotica, belichaamde AI en fysieke AI-toepassingen. het onderscheidt zich door zijn veelzijdigheid en dient als:
Een Universal Physics Engine: In staat om een breed scala aan materialen en fysieke verschijnselen te simuleren, waaronder stijve en gelede lichamen, vloeistoffen, gassen, vervormbare objecten en korrelige materialen.
Een robotica-simulatieplatform: Biedt een gebruiksvriendelijke interface voor het creëren en simuleren van complexe robotomgevingen met ongekend gemak en efficiëntie. Onderzoekers kunnen ingewikkelde scenario’s ontwerpen met verschillende robots, waaronder robotarmen, robots op poten, drones en zelfs zachte robots, en hun gedrag observeren in een zeer realistische virtuele wereld.
Een weergavesysteem: Met geavanceerde ray-tracing-mogelijkheden voor hoogwaardige visuele output die essentieel is voor presentaties, onderzoek en samenwerking. Hierdoor kunnen verbluffend realistische simulaties worden gemaakt, waardoor het begrip en de analyse van robotgedrag worden verbeterd.
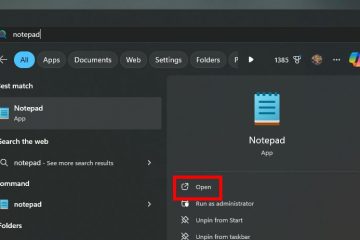
Een generatieve data-engine: Natuurlijke taalaanwijzingen transformeren in verschillende datamodaliteiten, zoals interactieve scènes, taakvoorstellen en robotgedrag. Met deze baanbrekende functie kunnen gebruikers een scenario in gewoon Engels beschrijven, en Genesis genereert de bijbehorende simulatieomgeving, compleet met objecten, robots en zelfs vooraf gedefinieerde taken.
Genesis biedt verschillende belangrijke functies die het tot een krachtig hulpmiddel maken voor onderzoekers en ontwikkelaars:
Geoptimaliseerde prestaties: maakt gebruik van GPU-versnelde parallelle berekeningen voor ultrasnelle simulatiesnelheden. Bij het simuleren van een manipulatiescène met een Franka-robotarm bereikt Genesis bijvoorbeeld een verbazingwekkende 43 miljoen frames per seconde (FPS) op een enkele RTX 4090 GPU. Deze ongelooflijke snelheid maakt snelle prototyping en testen van robotontwerpen en besturingsalgoritmen mogelijk.
Pythonic en gebruiksvriendelijk: volledig ontwikkeld in Python, met een intuïtief API-ontwerp voor eenvoudige installatie en gebruik. Dit maakt Genesis toegankelijk voor een breder scala aan gebruikers, ook voor mensen zonder uitgebreide programmeerervaring.
Compatibiliteit tussen platforms: Werkt native op verschillende besturingssystemen (Linux, macOS, Windows) en computerbackends (CPU, Nvidia GPU, AMD GPU, Apple Metal). Dit zorgt ervoor dat onderzoekers Genesis kunnen gebruiken, ongeacht hun voorkeur voor hardware of software.
Differentieerbare simulatie: Compatibel met AI-en machine learning-frameworks, ter ondersteuning van differentieerbare oplossers voor geavanceerde robotbesturingstoepassingen. Deze functie is cruciaal voor het trainen van robots met behulp van versterkend leren en andere AI-technieken, waardoor een efficiënte optimalisatie van robotgedrag mogelijk wordt.
Automatische slaapstand: versnelt op intelligente wijze simulaties door statische entiteiten automatisch in een laag energieverbruik te zetten. Dit verbetert de efficiëntie van Genesis verder, waardoor de simulatie van nog grotere en complexere omgevingen mogelijk wordt.
Ondersteuning voor brede bestandsformaten: Genesis ondersteunt het laden van verschillende bestandstypen, waaronder MJCF (.xml), URDF,.obj,.glb,.ply en.stl. Dit garandeert compatibiliteit met een breed scala aan bestaande robotmodellen en 3D-assets.
De engine, gecombineerd met geavanceerde AI-algoritmen, maakt het mogelijk dynamische, fysiek nauwkeurige simulaties te creëren die kunnen worden gebruikt om robots te trainen in een veilige en gecontroleerde omgeving. Door gebruik te maken van de kracht van grafische kaarten kan Genesis tot wel 100.000 kopieën van een simulatie gelijktijdig uitvoeren, waardoor snelle iteratie en verfijning van besturingsalgoritmen mogelijk wordt.
 Genesis streeft ernaar een generatieve robotagent en een fysica-engine te gebruiken om automatisch robotbeleid en demonstratiegegevens te genereren voor verschillende vaardigheden onder verschillende scenario’s. (Bron: Genesis GitHub-pagina)
Genesis streeft ernaar een generatieve robotagent en een fysica-engine te gebruiken om automatisch robotbeleid en demonstratiegegevens te genereren voor verschillende vaardigheden onder verschillende scenario’s. (Bron: Genesis GitHub-pagina)
Het enorme parallellisme lijkt op het hebben van een leger robots die tegelijkertijd leren, waarbij elk bijdraagt aan de collectieve kennis en het versnellen van het innovatietempo.
“Eén uur rekentijd geeft een robot 10 jaar trainingservaring. Zo kon Neo in een oogwenk vechtsporten leren in de Matrix Dojo”, schreef Jim Fan, een co-auteur van het Genesis-onderzoeksartikel, over X.
Als een AI kan 1.000 robots besturen om 1 miljoen vaardigheden uit te voeren in 1 miljard verschillende simulaties, en dan zou het’gewoon kunnen werken’in onze echte wereld, wat gewoon een ander punt is in de enorme ruimte van mogelijke realiteiten. Dit is het fundamentele principe achter waarom simulatie werkt dus… pic.twitter.com/sKDsisBewZ
— Jim Fan (@DrJimFan) 19 december 2024
Fan, die heeft bijgedragen aan verschillende robotica-simulatieprojecten voor Nvidia, legt de essentie van het transformatieve potentieel van Genesis vast. Deze versnelling versnelt niet alleen het ontwikkelingsproces, maar maakt ook de verkenning mogelijk van een een breder scala aan robotgedrag en-strategieën, wat leidt tot robuustere en aanpasbare robots.
Werelden geweven uit woorden
Genesis gaat verder dan alleen het versnellen van simulaties; het stelt gebruikers in staat hele werelden vanaf de grond af aan te creëren met behulp van de kracht van taal. Door gebruik te maken van vision-taalmodellen (VLM’s), een soort kunstmatige intelligentie die zowel tekst als afbeeldingen kan begrijpen en genereren, kan Genesis eenvoudige tekstbeschrijvingen omzetten in dynamische, interactieve 3D-omgevingen.
Stel je voor dat je een paar zinnen typt die een stadscentrum beschrijven, compleet met kruispunten, mensen, voertuigen en gebouwen, en dan kijkt hoe Genesis die scène tot leven brengt in een fysiek nauwkeurige simulatie, vol met de nuances van licht , schaduw en beweging.
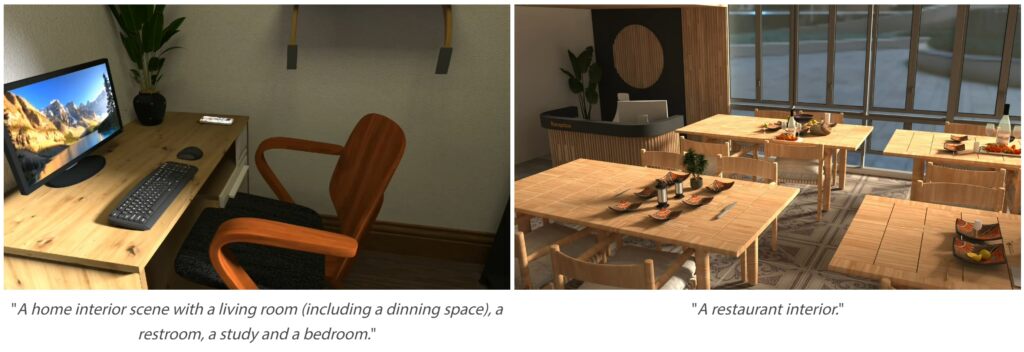 Genesis Physics AI-simulatie-engine gebruikt voor het genereren van interactieve 3D-scènes. (Bron: Genesis GitHub-pagina)
Genesis Physics AI-simulatie-engine gebruikt voor het genereren van interactieve 3D-scènes. (Bron: Genesis GitHub-pagina)
Deze tekst-naar-wereld-generatiemogelijkheid opent een rijk aan mogelijkheden voor robotica onderzoek en daarbuiten. Onderzoekers kunnen snel en eenvoudig complexe scenario’s creëren om de navigatie-, manipulatie-en interactievaardigheden van robots te testen.
Hiermee kan een robot leren navigeren op een drukke weg, producten afleveren en obstakels vermijden, allemaal binnen een gesimuleerde omgeving die wordt gegenereerd uit een paar regels tekst. Dit bespaart niet alleen tijd en middelen, maar maakt ook het creëren van zeer specifieke en op maat gemaakte trainingsscenario’s mogelijk.
Bovendien heeft de technologie het potentieel om een revolutie teweeg te brengen in de creatie van virtuele werelden voor gaming, entertainment en zelfs onderwijs. Een ander mogelijk gebruiksscenario zou kunnen zijn dat onderzoekers historische gebeurtenissen of wetenschappelijke concepten onderzoeken in meeslepende, door AI gegenereerde omgevingen die dynamisch reageren op hun acties.
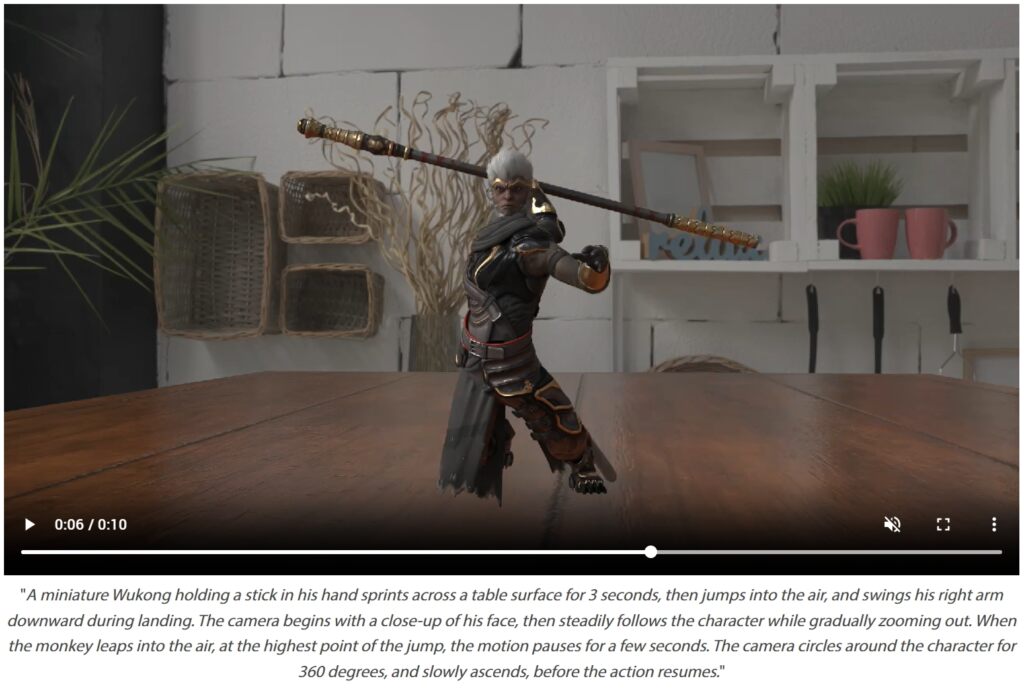 Genesis Physics AI-simulatie-engine gebruikt voor het genereren van interactieve 3D-karakterbewegingen. (Bron: Genesis GitHub-pagina)
Genesis Physics AI-simulatie-engine gebruikt voor het genereren van interactieve 3D-karakterbewegingen. (Bron: Genesis GitHub-pagina)
In plaats van passief te lezen over een historische plek, konden ze door de straten van een simuleerde de interactie van Athene met virtuele burgers en zag hoe de Akropolis wordt gebouwd.
Genesis en RoboGen: een gedeelde visie op de toekomst van de robotica
De ontwikkeling van Genesis resoneert met de ambities van andere ambitieuze projecten op het gebied van robotica, zoals het nauw verwante RoboGen-project. Robogen is een open-sourceplatform gericht op de co-evolutie van robotlichamen en hersenen, waarbij Genesis als basis wordt gebruikt voor zijn simulaties.
Het primaire doel is om robots te ontwikkelen die eenvoudig kunnen worden vervaardigd met behulp van 3D-printen en gemakkelijk verkrijgbare, goedkope elektronische componenten, zoals een Arduino-microcontrollerbord, 3D-geprinte modulaire onderdelen en servomotoren.
RoboGen heeft tot doel kennis uit grootschalige modellen te halen en deze toe te passen op robotica, waardoor een eindeloze stroom van vaardigheidsdemonstraties voor diverse taken en omgevingen ontstaat.
Dit wordt bereikt via een viertrapstraject pijpleiding:
Taakvoorstel: Nieuwe taken voorstellen die de robot kan leren. Dit kunnen taken zijn zoals het grijpen van objecten, het navigeren door obstakels of zelfs het uitvoeren van complexere acties zoals het openen van deuren of het in elkaar zetten van structuren.
Scènegeneratie: Het creëren van overeenkomstige omgevingen voor de voorgestelde taken. Dit omvat het genereren van realistische virtuele werelden met verschillende objecten, obstakels en terreinkenmerken waarmee de robot moet communiceren.
Genereren van trainingssupervisie: het genereren van trainingsgegevens en supervisie voor het leerproces van de robot. Dit kan het geven van demonstraties van de gewenste taak inhouden, het stellen van doelen of het definiëren van beloningsfuncties voor versterkend leren.
Vaardigheden leren: De robot in staat stellen nieuwe vaardigheden te verwerven op basis van de gegenereerde informatie. Hierbij worden machine learning-algoritmen gebruikt om het besturingssysteem van de robot te trainen, waardoor deze zich in de loop van de tijd kan aanpassen en verbeteren.
“Ons werk probeert de uitgebreide en veelzijdige kennis die is ingebed in grootschalige modellen over te dragen naar het veld van de robotica, waardoor een stap wordt gezet in de richting van geautomatiseerde grootschalige robotvaardigheidstraining en demonstratieverzameling voor het bouwen van generaliseerbare robotsystemen,”de RoboGen-onderzoekspaper stelt
Dit komt overeen met het doel van Genesis om een krachtig en veelzijdig platform voor robottraining te bieden, waardoor de mogelijkheid bestaat om de robot te trainen. ontwikkeling van robuustere en aanpasbare robots voor toepassingen in de echte wereld.
Beyond Robotics: een blik in de toekomst van AI
Maar Genesis is meer dan alleen een robotica-simulator; het is een kijkje in de toekomst van AI-gestuurde contentcreatie. De generatieve mogelijkheden reiken verder dan 3D-omgevingen en omvatten karakterbewegingen, gezichtsanimaties en zelfs fysiek nauwkeurige video’s levensechte karakters, in staat emoties te uiten en op een fysiek plausibele manier met hun omgeving om te gaan. Dit is het soort meeslepende ervaring dat Genesis zou kunnen helpen creëren. Dit heeft niet alleen implicaties voor entertainment en gaming, maar ook voor gebieden als virtual reality, augmented reality en zelfs therapie en revalidatie.
Hoewel het generatieve systeem nog niet is opgenomen in de publiekelijk beschikbare code op GitHub, het ontwikkelingsteam is van plan het in de toekomst uit te brengen. Terwijl Genesis zich blijft ontwikkelen, belooft het een krachtig hulpmiddel te worden voor zowel onderzoekers als makers, dat de grenzen verlegt van wat mogelijk is in de digitale wereld en de grenzen tussen de fysieke realiteit en virtuele simulatie vervaagt.
De mogelijkheid om realistische simulaties te genereren op basis van tekstbeschrijvingen zou een revolutie teweeg kunnen brengen in de manier waarop we virtuele omgevingen ontwerpen, testen en ermee omgaan.
Ethische overwegingen van AI-aangedreven robotica >
Zoals bij elke transformatieve technologie roept de opkomst van AI-aangedreven robotica belangrijke ethische overwegingen op. Nu robots steeds geavanceerder worden en in ons leven worden geïntegreerd, is het van cruciaal belang ervoor te zorgen dat ze op verantwoorde wijze worden ontwikkeld en ingezet. Dit omvat onder meer het aanpakken van zorgen over het verdwijnen van banen, algoritmische vooroordelen en het potentiële misbruik van roboticatechnologie.
Het open-sourcekarakter van platforms als Genesis kan een cruciale rol spelen bij het bevorderen van ethische ontwikkeling. Door de onderliggende technologie transparant en toegankelijk te maken, wordt een groter toezicht en verantwoordelijkheid mogelijk. Dit kan ervoor zorgen dat door AI aangedreven robotica worden ontwikkeld op een manier die de mensheid ten goede komt en aansluit bij onze waarden.