Der Einstieg in die Robotik für Anfänger ist am einfachsten, wenn Sie einen einfachen Roboter mit Rädern aus einem Arduino-Board, einem Motortreiber und einem Abstandssensor bauen. Dieses praktische Projekt eignet sich auch für Robotikprogrammierung für Anfänger mit einer kurzen, lesbaren Skizze.
Was Sie bauen werden
Ein zweirädriger Roboter mit Differenzialantrieb, der vorwärts rollt und sich dreht, wenn er ein Hindernis erkennt. Es verwendet gängige Teile, die in jedem Robotikbausatz verfügbar sind.
Controller: Arduino UNO (oder Elegoo UNO R3) oder Seeed Romeo BLE, wenn Sie integrierte Motoranschlüsse bevorzugen. Motortreiber: L298N oder TB6612FNG Dual-DC-Treiber. Antrieb: 2 Gleichstrom-Getriebemotoren mit Rädern sowie eine hintere Lenkrolle. Sensor: HC-SR04 Ultraschall (oder IR-Distanzmodul). Stromversorgung: 4–6x AA-Halter oder 2S Li-Ion mit Schalter und 1–2 A Sicherung. Chassis: Acryl-/Aluminiumplatte mit Abstandshaltern (Chassis des Elegoo Smart Robot Kit funktioniert gut). Verkabelung: Verschiedene Stecker-Buchsen-Jumper, Batteriekabel mit ordentlichem Durchmesser. Werkzeuge: Kleine Schraubendreher, Abisolierzange, Seitenschneider, optionaler Lötkolben. 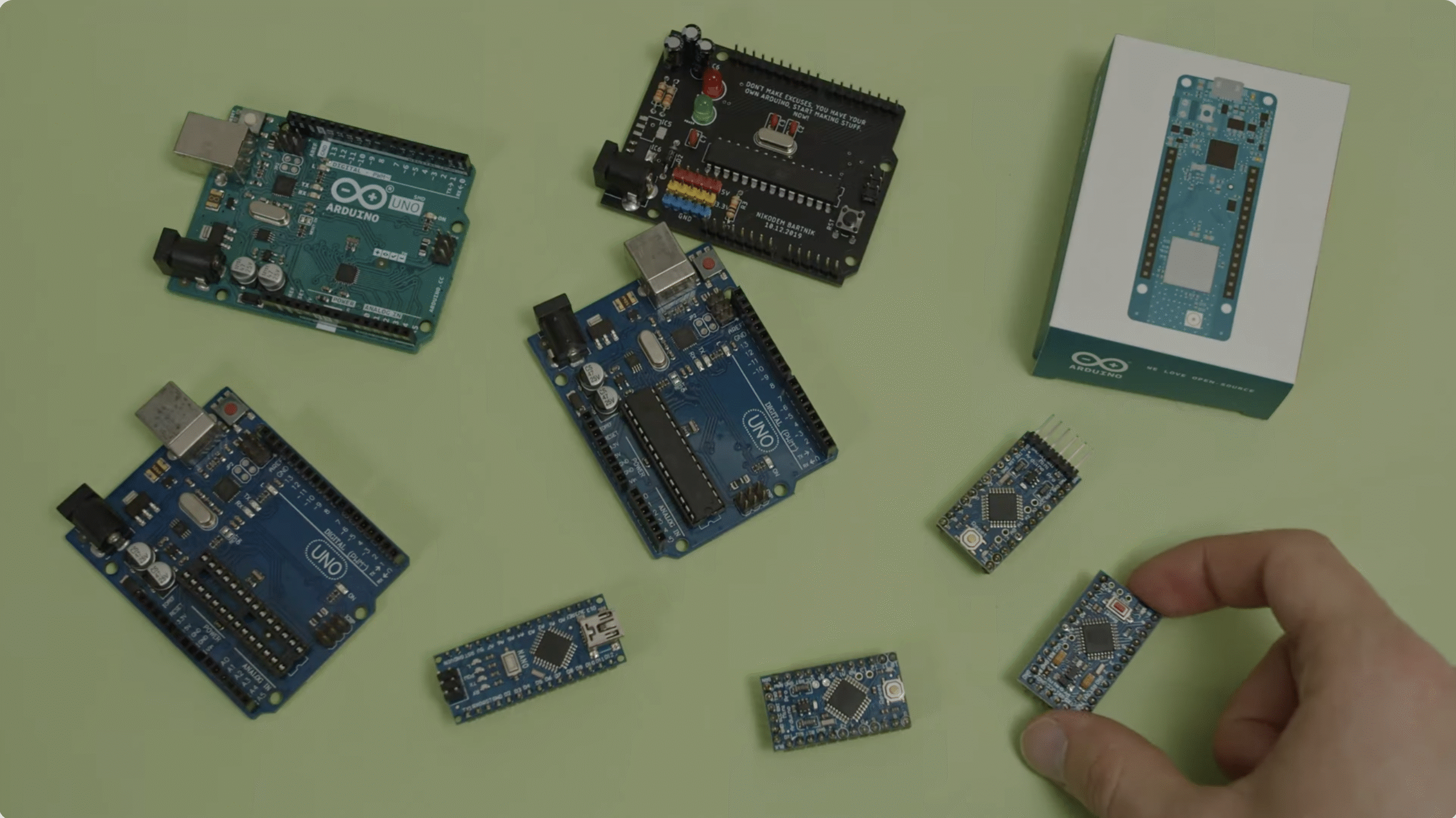
Bevor Sie beginnen
Laden Sie neue Batterien auf oder installieren Sie sie; Überprüfen Sie die Polarität mit einem Multimeter. Bewahren Sie den Controller auf einer separaten Abstandsschicht auf, um Kurzschlüsse zu vermeiden. Drucken Sie eine einseitige Checkliste für Robotik für Anfänger im PDF-Format aus, damit Sie jeden Schritt als erledigt markieren können.
Bauschritte (nummeriert)
Motoren und Räder montieren: Befestigen Sie beide Gleichstrommotoren am Chassis. Drücken Sie die Räder ein und fügen Sie die hintere Laufrolle hinzu, damit der Bot gerade steht. 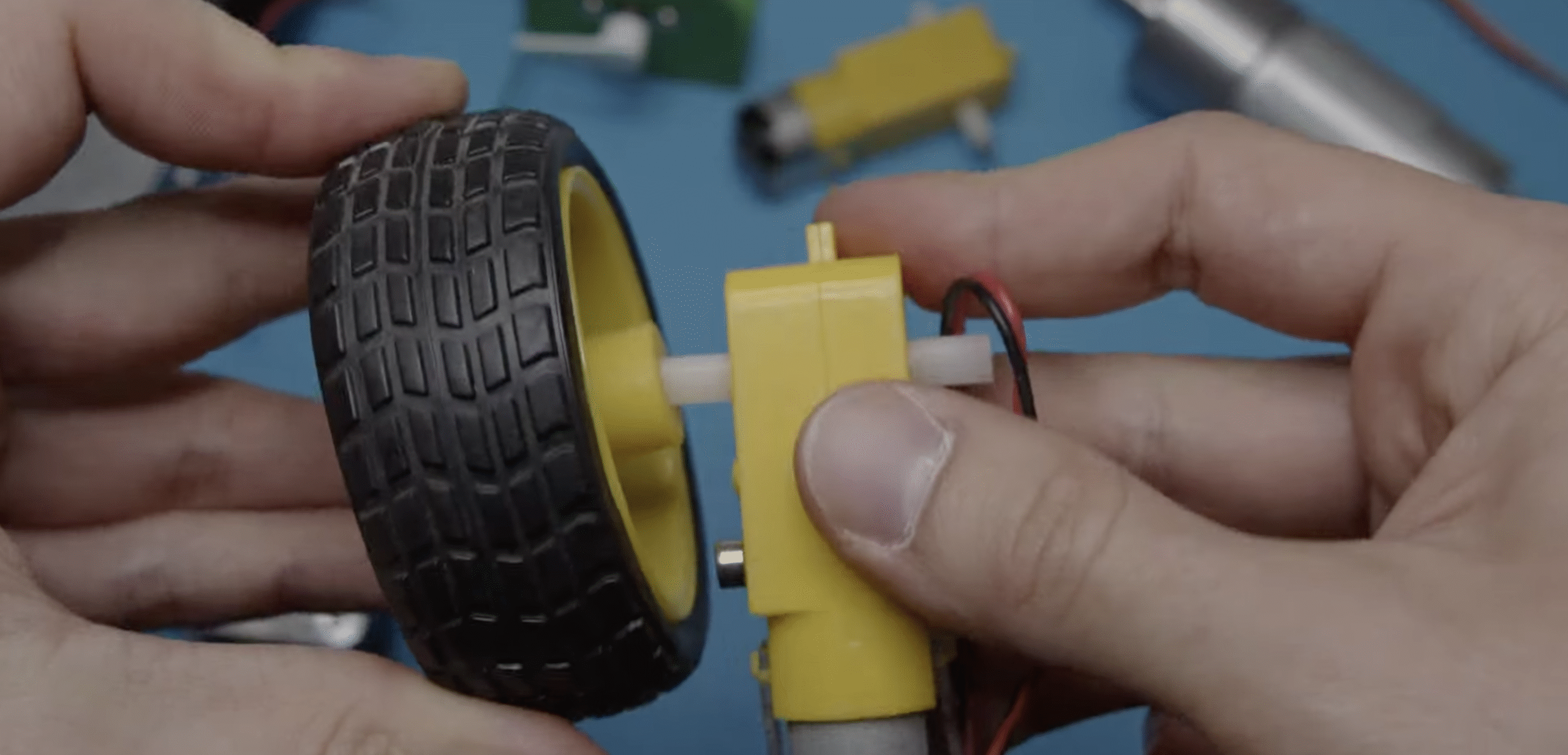 Installieren Sie den Motortreiber: Befestigen Sie den L298N/TB6612FNG auf Abstandshaltern. Beachten Sie die Eingänge (IN1–IN4) und Ausgänge (MA/MB). Stromversorgung und Schalter verkabeln: Batterie + durch den Kippschalter und die Sicherung zur Fahrer-FIN verlegen; Route Batterie – zum Fahrer-GND. Arduino platzieren: UNO oder Romeo platzieren. Verbinden Sie die Treibereingänge mit PWM-fähigen Pins (für UNO, z. B. D5, D6, D9, D10).
Installieren Sie den Motortreiber: Befestigen Sie den L298N/TB6612FNG auf Abstandshaltern. Beachten Sie die Eingänge (IN1–IN4) und Ausgänge (MA/MB). Stromversorgung und Schalter verkabeln: Batterie + durch den Kippschalter und die Sicherung zur Fahrer-FIN verlegen; Route Batterie – zum Fahrer-GND. Arduino platzieren: UNO oder Romeo platzieren. Verbinden Sie die Treibereingänge mit PWM-fähigen Pins (für UNO, z. B. D5, D6, D9, D10).  Fügen Sie den Sensor hinzu: Montieren Sie den HC-SR04 vorne. Verdrahten Sie VCC, GND, TRIG und ECHO mit beschrifteten Arduino-Pins. Erdungsprüfung: Stellen Sie sicher, dass alle Module die gleiche Masse haben. Ziehen Sie leicht an jedem Jumper, um eine feste Verbindung sicherzustellen. Leistungstest: Wenn die Räder vom Tisch abgenommen sind, betätigen Sie den Schalter. Kein Rauch, keine Hitze, LEDs normal.
Fügen Sie den Sensor hinzu: Montieren Sie den HC-SR04 vorne. Verdrahten Sie VCC, GND, TRIG und ECHO mit beschrifteten Arduino-Pins. Erdungsprüfung: Stellen Sie sicher, dass alle Module die gleiche Masse haben. Ziehen Sie leicht an jedem Jumper, um eine feste Verbindung sicherzustellen. Leistungstest: Wenn die Räder vom Tisch abgenommen sind, betätigen Sie den Schalter. Kein Rauch, keine Hitze, LEDs normal.
Programmieren Sie den Roboter
Öffnen Sie Ihre IDE und fügen Sie diese minimale Skizze ein. Es fährt vorwärts, bis ein Hindernis in der Nähe ist, und schwenkt dann. Dies eignet sich für Robotikprogrammierung für Anfänger.
//Minimaler Hindernis-Avoid-Bot (Arduino-Stil) const int in1=5, in2=6, in3=9, in4=10; //Motorpins (PWM-fähig) const int trig=2, echo=3; //ultraschall long distCM(){ digitalWrite(trig,LOW); VerzögerungMikrosekunden(2); digitalWrite(trig,HIGH); VerzögerungMikrosekunden(10); digitalWrite(trig,LOW); long d=pulseIn(echo,HIGH,25000); //Timeout ~25 ms return d*0.034/2; } void motor(int L,int R){//-255..255 analogWrite(in1, L>0?L:0); analogWrite(in2, L<0?-L:0); analogWrite(in3, R>0?R:0); analogWrite(in4, R<0?-R:0); } void setup(){ pinMode(trig,OUTPUT); pinMode(echo,INPUT); } void loop(){ if(distCM()>25) motor(140,140); else { motor(150,-150); Verzögerung (350); } }
Laden Sie den Roboter hoch, stellen Sie ihn auf den Boden und testen Sie ihn in einem offenen Bereich. Halten Sie eine Hand in der Nähe des Schalters.
Tune and Extend
Trimmen Sie die geradlinige Bewegung, indem Sie die PWM am schnelleren Rad leicht reduzieren. Wechseln Sie zu einem Zeilensensor und schreiben Sie einen einfachen P-Controller für die Nachverfolgung. Fügen Sie die Bluetooth-Steuerung von Ihrem Telefon aus mit einem HC-05 und einer seriellen App hinzu.
Fehlerbehebung
Motoren drehen nicht
Der Akku lässt unter Last nach. Versuchen Sie es mit frischen Zellen oder einem Akku mit höherer Stromstärke. Pins stimmen nicht überein. Bestätigen Sie, dass die Code-Pins mit den Fahrereingaben übereinstimmen. Keine Gemeinsamkeit. Verbinden Sie den Arduino-GND mit dem Treiber-GND.
Roboter dreht nach links/rechts
Räder oder Getriebe sind unterschiedlich. Balance mit kleinen PWM-Änderungen pro Seite. Chassisflex. Setzen Sie die Abstandshalter wieder ein, sodass die Wellen parallel sind.
Sensor zeigt Null oder Maximum an
TRIG/ECHO falsch verdrahtet. Bei Bedarf austauschen. Echo-Timeout zu lang; Reduzieren Sie das PulseIn-Timeout für Stabilität. Montieren Sie den Sensor entfernt von den Rädern, um Vibrationen zu reduzieren.
Mehr erfahren (Fast Paths)
Drucken Sie eine einseitige Checkliste als Robotik für Anfänger-PDF aus. Durchsuchen Sie ein gut bewertetes Robotikbuch nach Konzepten, die Sie wiederverwenden können. Probieren Sie kostenlose Robotikkurse für Anfänger aus, um die Codestruktur zu üben.
Zusammenfassung
Sammeln Sie Teile aus einem zuverlässigen Robotik-Bausatz. Montieren Sie Chassis, Treiber, Stromversorgung und Sensor mit gemeinsamer Erdung. Laden Sie die Minimalvermeidungsskizze hoch und testen Sie sie. Optimieren Sie PWM, fügen Sie Funktionen hinzu und iterieren Sie mit kleinen Änderungen. Lernen Sie weiter mit Kursen, einem kurzen PDF und einem soliden Einsteigerbuch.