Começar com robótica para iniciantes é mais fácil quando você constrói um robô simples com rodas usando uma placa classe Arduino, um driver de motor e um sensor de distância. Este projeto prático também se adapta à programação robótica para iniciantes com um esboço curto e legível.
O que você construirá
Um robô com acionamento diferencial de duas rodas que rola para frente e gira quando detecta um obstáculo. Ele usa peças comuns disponíveis em qualquer kit de robótica.
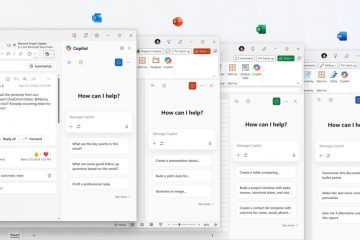
Controlador: Arduino UNO (ou Elegoo UNO R3) ou Seeed Romeo BLE se você preferir conectores de motor integrados. Driver do motor: driver DC duplo L298N ou TB6612FNG. Acionamento: 2 motores DC com rodas e um rodízio traseiro. Sensor: ultrassônico HC-SR04 (ou módulo de distância IR). Alimentação: suporte AA 4–6x ou íon de lítio 2S com interruptor e fusível de 1–2 A. Chassis: Placa de acrílico/alumínio com espaçadores (o chassi do Elegoo Smart Robot Kit funciona bem). Fiação: Jumpers macho-fêmea variados, cabos de bateria de calibre decente. Ferramentas: Chaves de fenda pequenas, descascador de fios, cortadores laterais, ferro de soldar opcional. 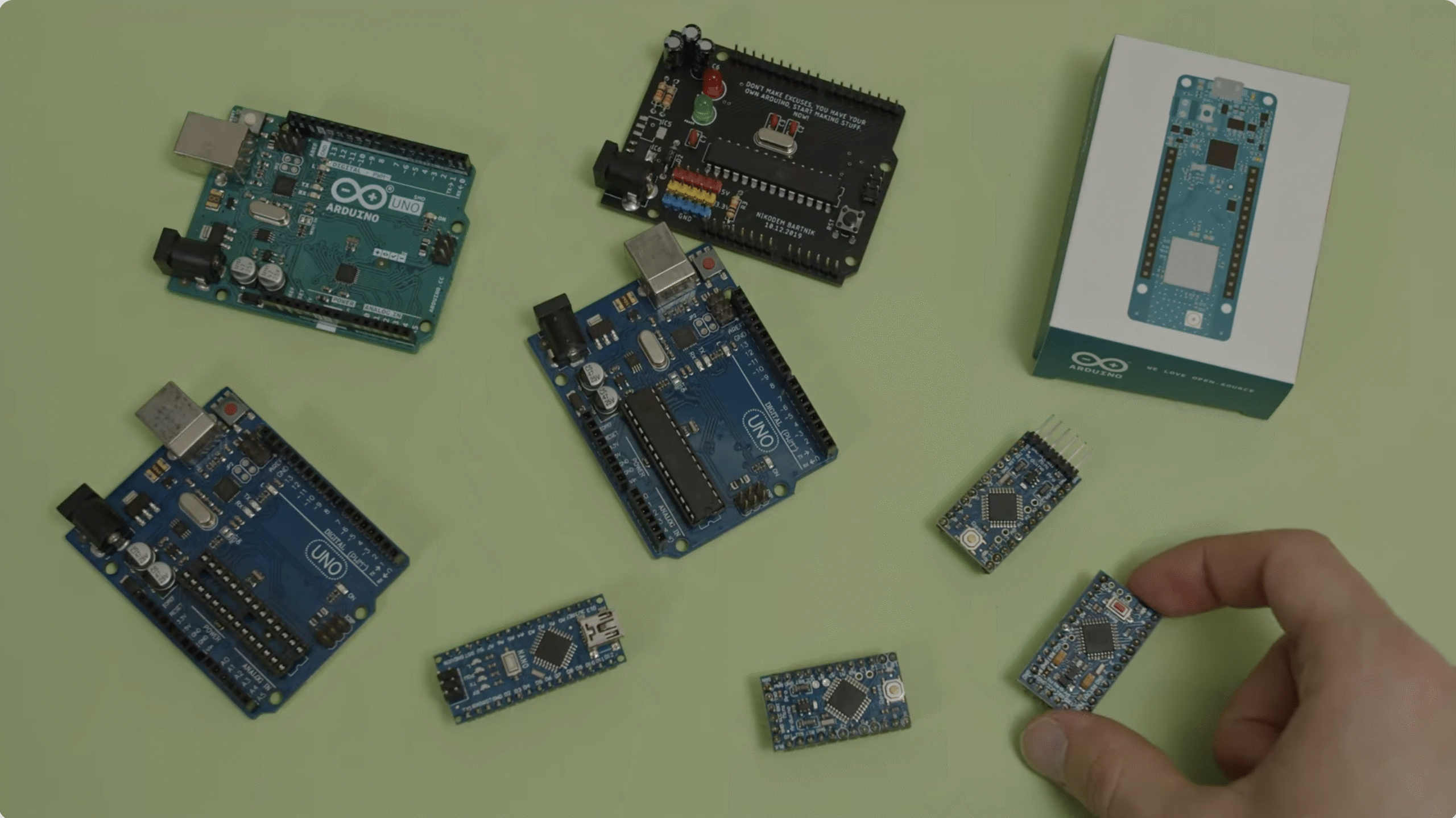
Antes de começar
Carregue ou instale baterias novas; verifique a polaridade com um multímetro. Mantenha o controlador em uma camada separada para evitar curtos. Imprima uma lista de verificação em PDF de robótica para iniciantes de uma página para que você possa marcar cada etapa como concluída.
Etapas de construção (numeradas)
Montar motores e rodas: Fixe ambos os motores CC no chassi. Pressione as rodas e adicione o rodízio traseiro para que o bot fique nivelado. 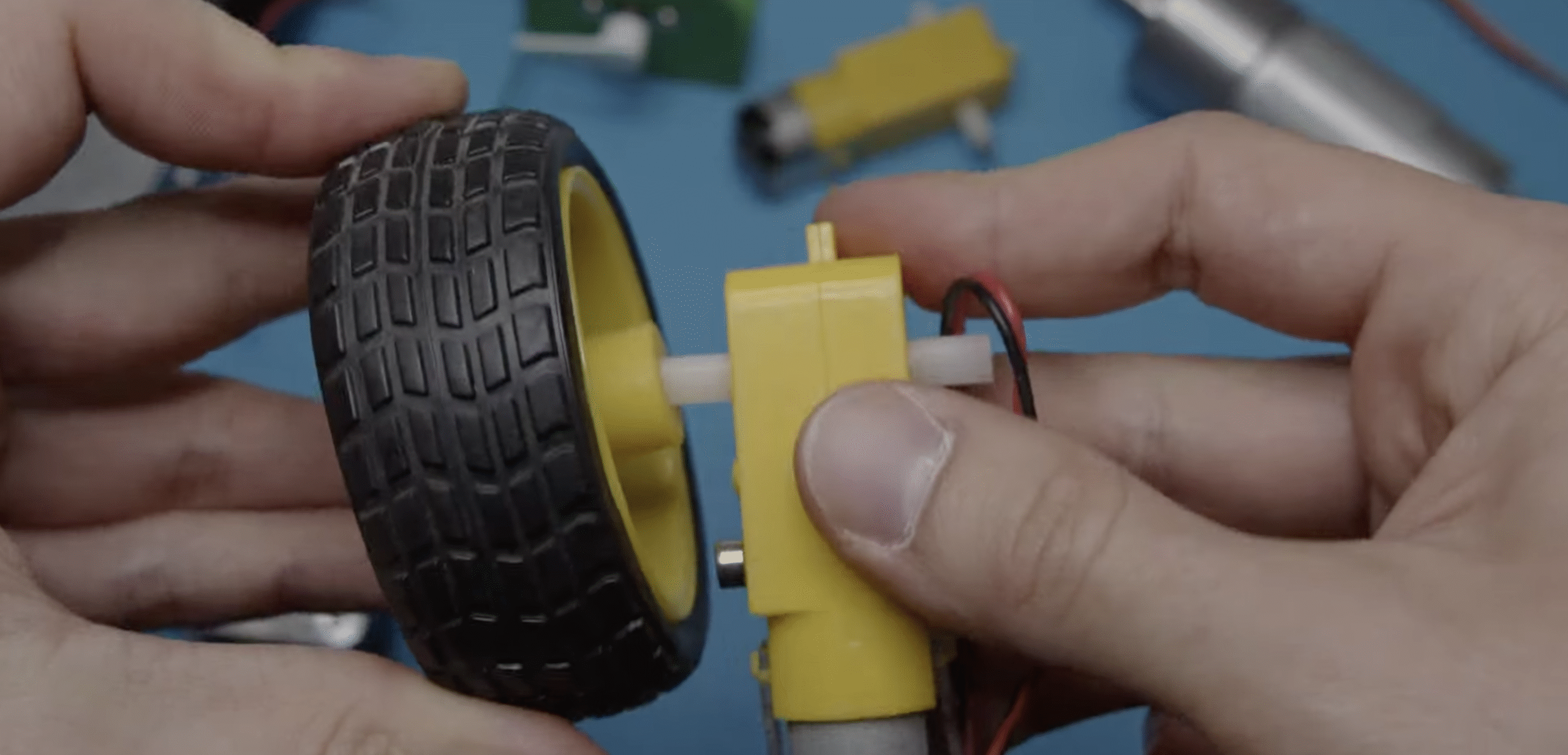 Instale o driver do motor: Prenda o L298N/TB6612FNG em espaçadores. Observe as entradas (IN1–IN4) e saídas (MA/MB). Fie a alimentação e o interruptor: direcione a bateria + através da chave seletora e do fusível para o VIN do driver; encaminhar a bateria – para o motorista GND. Assente o Arduino: Coloque o UNO ou Romeo. Conecte as entradas do driver aos pinos compatíveis com PWM (para UNO, por exemplo, D5, D6, D9, D10).
Instale o driver do motor: Prenda o L298N/TB6612FNG em espaçadores. Observe as entradas (IN1–IN4) e saídas (MA/MB). Fie a alimentação e o interruptor: direcione a bateria + através da chave seletora e do fusível para o VIN do driver; encaminhar a bateria – para o motorista GND. Assente o Arduino: Coloque o UNO ou Romeo. Conecte as entradas do driver aos pinos compatíveis com PWM (para UNO, por exemplo, D5, D6, D9, D10).  Adicione o sensor: Monte o HC-SR04 na frente. Conecte VCC, GND, TRIG e ECHO aos pinos rotulados do Arduino. Verificação de solo: certifique-se de que todos os módulos compartilhem GND. Puxe cada jumper levemente para confirmar uma conexão sólida. Teste de potência: Com as rodas fora da mesa, acione o interruptor. Sem fumaça, sem calor, LEDs normais.
Adicione o sensor: Monte o HC-SR04 na frente. Conecte VCC, GND, TRIG e ECHO aos pinos rotulados do Arduino. Verificação de solo: certifique-se de que todos os módulos compartilhem GND. Puxe cada jumper levemente para confirmar uma conexão sólida. Teste de potência: Com as rodas fora da mesa, acione o interruptor. Sem fumaça, sem calor, LEDs normais.
Programe o Robô
Abra seu IDE e cole este esboço mínimo. Ele avança até que um obstáculo esteja próximo e depois gira. Isso se adapta à programação robótica para iniciantes.
//Bot mínimo para evitar obstáculos (estilo Arduino) const int in1=5, in2=6, in3=9, in4=10; //pinos do motor (capazes de PWM) const int trig=2, echo=3; //ultrassônico longo distCM(){ digitalWrite(trig,LOW); atrasoMicrossegundos(2); digitalWrite(trig,ALTO); atrasoMicrossegundos(10); digitalWrite(trig,BAIXO); longo d=pulseIn (eco, ALTO, 25000); //tempo limite ~25 ms return d*0.034/2; } void motor(int L,int R){//-255..255 analogWrite(in1, L>0?L:0); analogWrite(in2, L<0?-L:0); analogWrite(in3, R>0?R:0); analogWrite(in4, R<0?-R:0); } void setup(){ pinMode(trig,OUTPUT); pinMode(eco,INPUT); } void loop(){ if(distCM()>25) motor(140,140); senão {motor(150,-150); atraso(350); } }
Carregue, coloque o robô no chão e teste em uma área aberta. Mantenha uma mão perto do interruptor.
Ajuste e Estenda
Corte o movimento em linha reta reduzindo ligeiramente o PWM na roda mais rápida. Troque para um sensor de linha e escreva um controlador P simples para rastreamento. Adicione controle Bluetooth do seu telefone usando um HC-05 e um aplicativo serial.
Solução de problemas
Os motores não giram
A bateria afunda sob carga. Experimente células novas ou um pacote de corrente superior. Pinos incompatíveis. Confirme se os pinos do código correspondem às entradas do driver. Nenhum terreno comum. Amarre o Arduino GND ao driver GND.
O robô vira para a esquerda/direita
As rodas ou caixas de câmbio são diferentes. Equilíbrio com pequenas alterações de PWM por lado. Chassi flexível. Recoloque os espaçadores para que os eixos fiquem paralelos.
Sensor lê zero ou máximo
TRIG/ECHO incorretamente conectado. Troque se necessário. Tempo limite de eco muito longo; reduza o tempo limite do pulseIn para estabilidade. Monte o sensor longe das rodas para reduzir a vibração.
Saiba mais (caminhos rápidos)
Imprima uma lista de verificação de uma página como um PDF de robótica para iniciantes. Dê uma olhada em um livro de robótica bem avaliado em busca de conceitos que você reutilizará. Experimente cursos gratuitos de robótica para iniciantes para praticar a estrutura do código.
Resumo
Reúna peças de um kit de robótica confiável. Monte chassi, driver, alimentação e sensor com aterramento compartilhado. Carregue o esboço de evitação mínima e teste. Ajuste o PWM, adicione recursos e repita com pequenas alterações. Continue aprendendo com cursos, um PDF rápido e um livro sólido para iniciantes.